Prepare the Chair for the Bear!
Authors
Xin Meng, Hongtao Wu, Sipu Ruan, Gregory Chirikjian
Department of Mechanical Engineering, National University of Singapore
Laboratory for Computational and Sensing Robotics (LCSR), Johns Hopkins University
Abstract
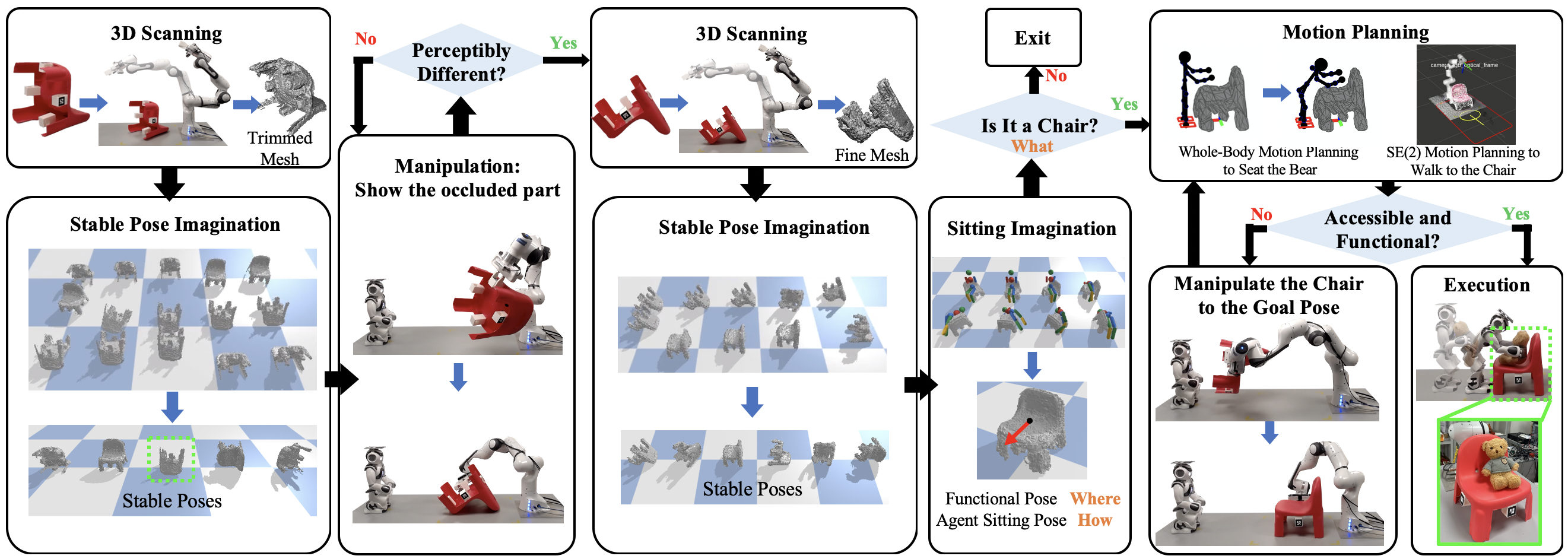
In this letter, a paradigm for the classification and manipulation of novel objects is established and demonstrated through a real example of chairs. Our approach leverages the robot’s understanding of object stability, perceptibility, and affordance to prepare previously unseen and randomly oriented chairs for a teddy bear to sit on. The teddy bear is a proxy for an elderly person, hospital patient, or child. By autonomously reconstructing a complete model of the object and inserting it into a physical simulator (i.e., the robot’s “imagination”), the robot assesses whether the object is a chair and determines how to reorient it properly to be used. Experiment results show that our method achieves a high success rate on the real robot task of chair preparation. Also, it outperforms several baseline methods on the task of upright pose prediction for chairs. The developed system can be easily transferred to a wide variety of application scenarios, and illustrates a broader paradigm in affordance-based reasoning.