Is That a Chair? Imagining Affordances Using Simulations
of an Articulated Human Body
Hongtao Wu1, Deven Misra3, Gregory S. Chirikjian1,2
1Laboratory for Computational and Sensing Robotics, Johns Hopkins University2Department of Mechanical Engineering, National Unveristy of Singapore
3Physics Department, Reed College
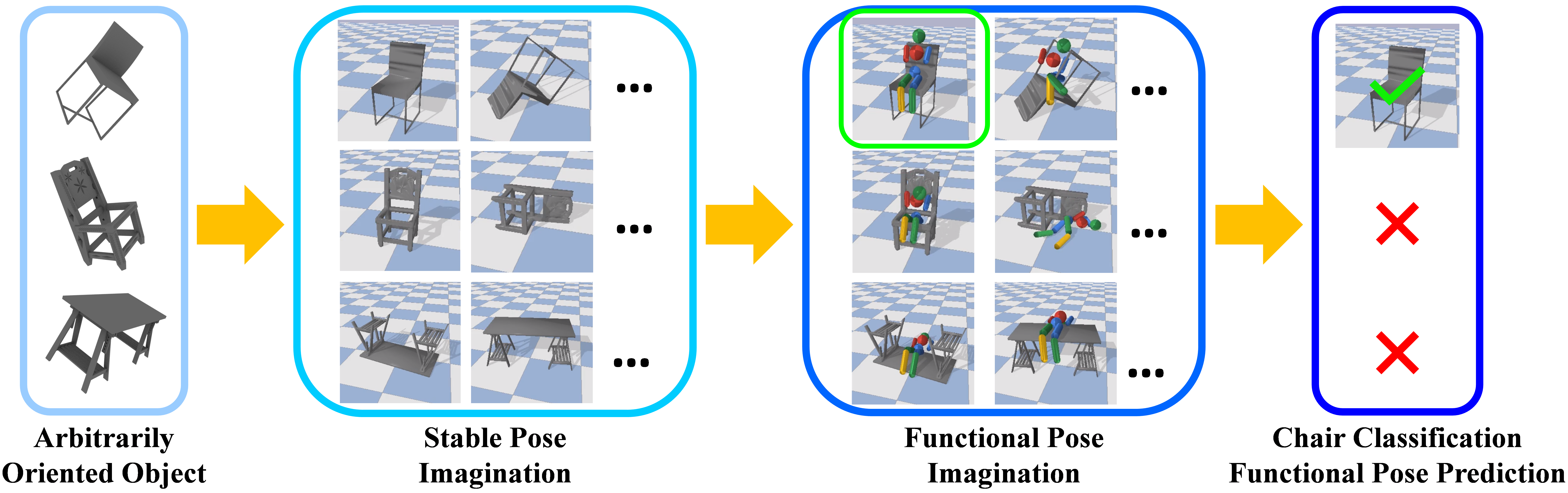
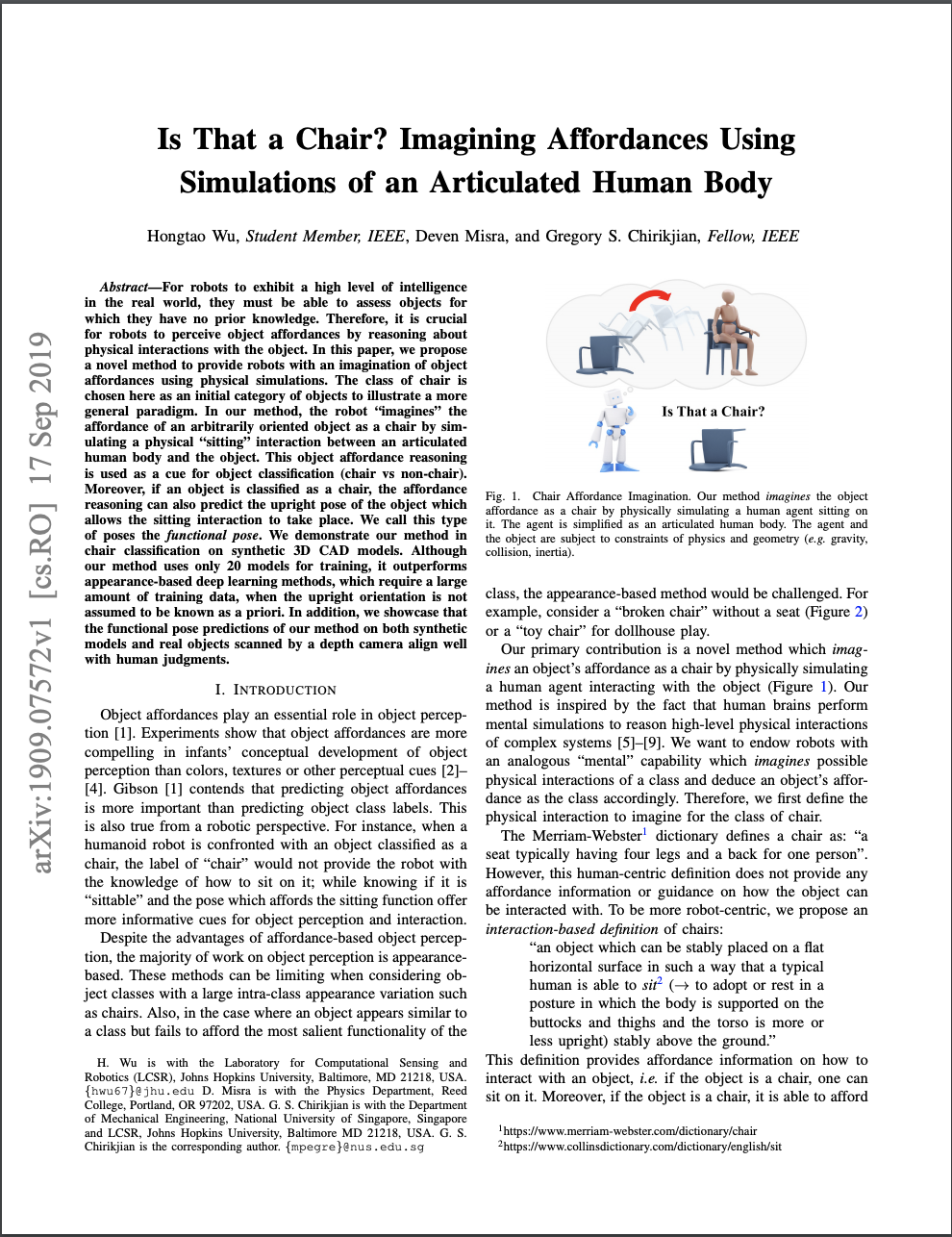
Figure 1: Chair Affordance Imagination. The imagination is composed of two steps: stable pose imagination
and functional pose imagination. Given an arbitrarily oriented object, we first imagine the stable poses of the
object. Then, we proceed to imagine the functional pose which is able to afford the functionality of sitting among
the stable poses.
|
AbstractFor robots to exhibit a high level of intelligence in the real world, they must be able to assess objects for which they have no prior knowledge. Therefore, it is crucial for robots to perceive object affordances by reasoning about physical interactions with the object. In this paper, we propose a novel method to provide robots with an ability to imagine object affordances using physical simulations. The class of chair is chosen here as an initial category of objects to illustrate a more general paradigm. In our method, the robot "imagines" the affordance of an arbitrarily oriented object as a chair by simulating a physical sitting interaction between an articulated human body and the object. This object affordance reasoning is used as a cue for object classification (chair vs non-chair). Moreover, if an object is classified as a chair, the affordance reasoning can also predict the upright pose of the object which allows the sitting interaction to take place. We call this type of poses the functional pose. We demonstrate our method in chair classification on synthetic 3D CAD models. Although our method uses only 30 models for training, it outperforms appearance-based deep learning methods, which require a large amount of training data, when the upright orientation is not assumed to be known a priori. In addition, we showcase that the functional pose predictions of our method align well with human judgments on both synthetic models and real objects scanned by a depth camera.Publication
CodegithubRelated LinksPut the bear on the chair. Prepare the chair for the bear. | ||
|
| ||
CONTACTPlease address all correspondence to Gregory S. Chirikjian at mpegre@nus.edu.sg. |